优化算法
指数加权平均数
我想向你展示几个优化算法,它们比梯度下降法快,要理解这些算法,你需要用到指数加权平均(Exponentially weighted averages),在统计中也叫做指数加权移动平均
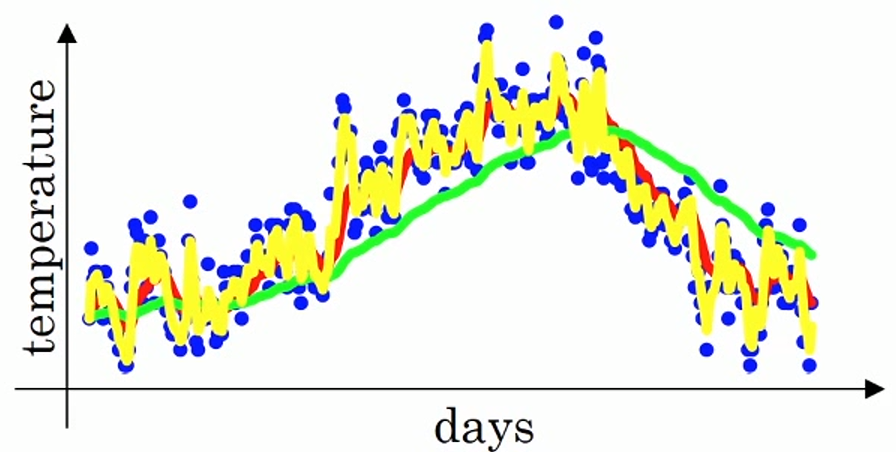
下面是某地一年中(时间-温度)的散点图。
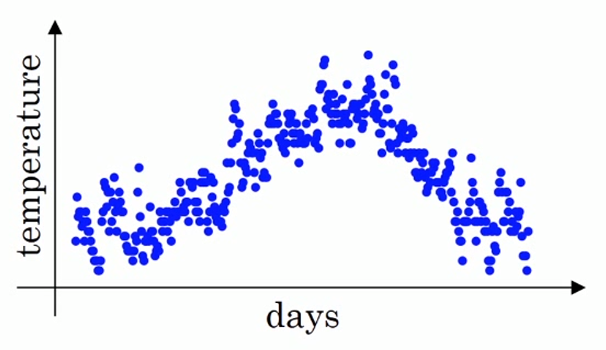
如果要计算趋势的话,也就是温度的局部平均值(或者说移动平均值)。
首先使$v_0=0$,每天需要使用$0.9$的加权数之前的数值加上当日温度$\theta_t$的0.1 倍,即
用红线表示该平均值,便得到这样的结果。
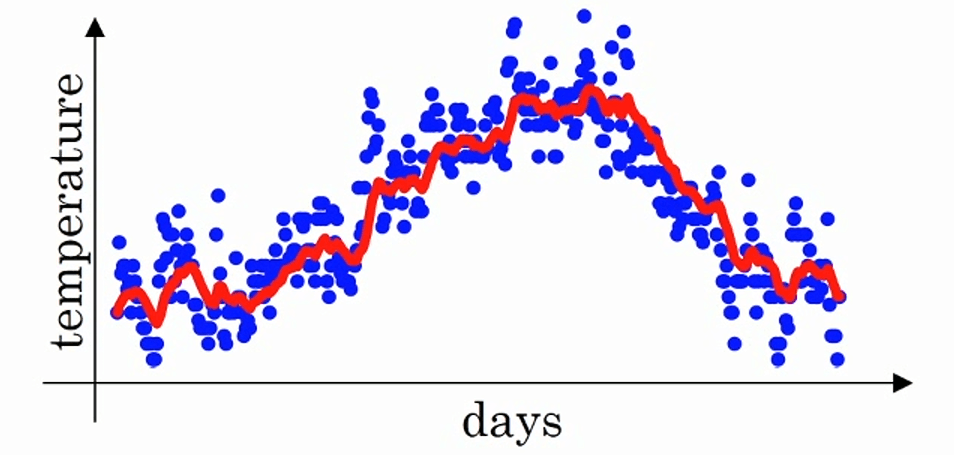
我们把$0.9$这个常数变成$\beta$,将之前的$0.1$变成$(1-\beta)$,得到移动平均值的一般形式
可将$v_t$大概视为前$\frac{1}{1-\beta}$天的平均温度
例如$\beta=0.9$,$v_t$(上图红线部分)约为前10天的平均值。
例如$\beta=0.98$,$v_t$(绿线部分)约为前50天的平均值。温度变化时,温度上下起伏小。
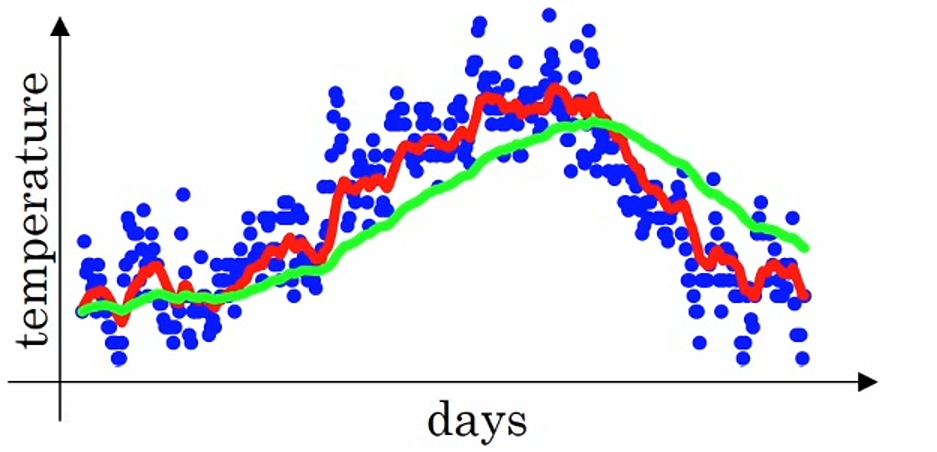
- 再例如$\beta=0.5$,$v_t$(黄线部分)约为前2天的平均值。温度变化时,温度上下起伏大。
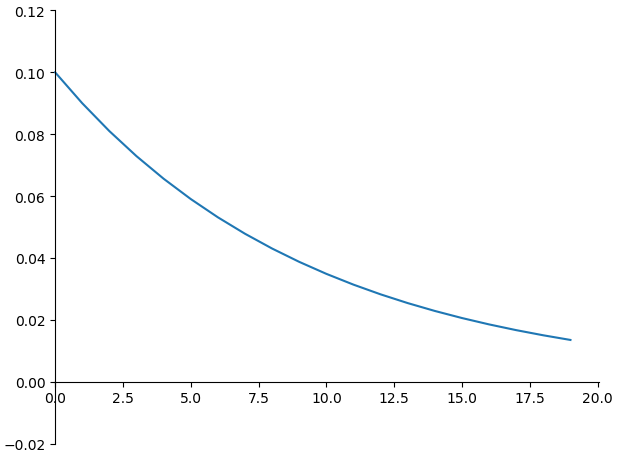
为什么可视为前$\frac{1}{1-\beta}$天的平均?
下图为$\beta=0.9$是,前i天的温度在$v_t$中所占的比例
由于
这个例子中:10天后,$\theta_{t-i}$在$v_t$中所占的比例就不足$\theta_t$的$\frac{1}{e}$倍了,所以认为$v_t$约为近10天的平均温度。
偏差修正
上文中,这个红色的线对应于$\beta=0.9$,绿色的线对应于$\beta=0.98$。
但如果执行的是这个公式的话,得到的$v_t$实际是紫色的线。
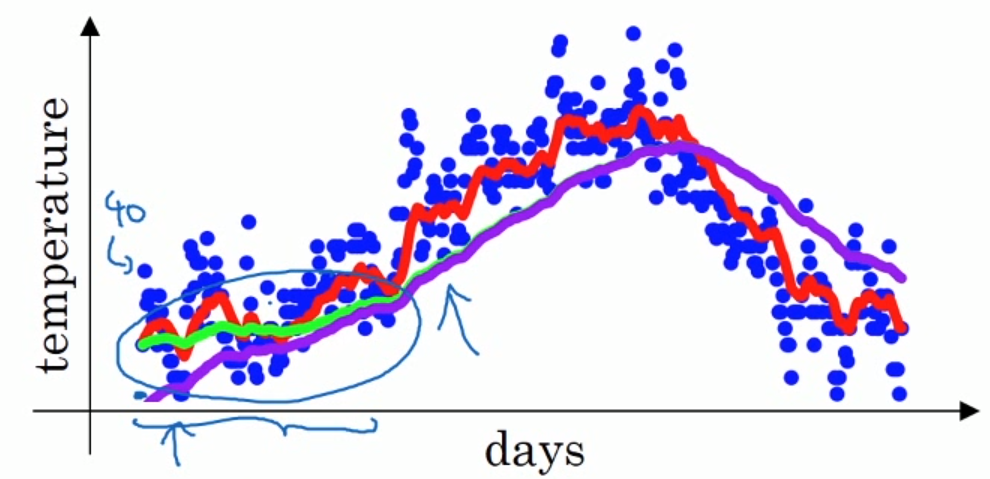
原因是我们初始化$v_0=0$,那么$v_1=0.98v_0+0.02\theta_1=0.02\theta_1$。所以对第一天的估计要小很多。
偏差修正可以修改这一估测,让估测变得更准确,特别是在估测初期,也就是不用$v_t$,而是用$\frac{v_t}{1-\beta^t}$,$t$是当前的天数。
动量梯度下降
Momentum
普通的梯度下降1
2# 普通更新
w += -learning_rate * dw
动量更新则是计算梯度的指数加权平均数,并利用该梯度进行更新
想象在一个碗状的函数上进行优化,某个位置的梯度是该点的加速度,梯度影响速度,速度再影响位置。(在普通更新中,梯度直接影响位置。)1
2
3# 动量更新
v = mu * v - learning_rate * dw # 梯度影响速度
w += v # 速度影响位置
- 在这里引入了一个初始化为0的变量
v和一个超参数mu。mu在最优化的过程中被看做动量(一般值设为0.9),但其物理意义与摩擦系数更一致。这个变量有效地抑制了速度,降低了系统的动能,不然质点在山底永远不会停下来。- 通过交叉验证,
mu通常设为[0.5,0.9,0.95,0.99]中的一个。
通过动量更新,参数向量会在任何有持续梯度的方向上增加速度。
例如在上图中,普通SGD更新如图所示;而动量更新,方向上下变化的梯度在速度上变化不大,而持续向右的梯度方向,则可使速度持续向右增加,从而更快的下降。
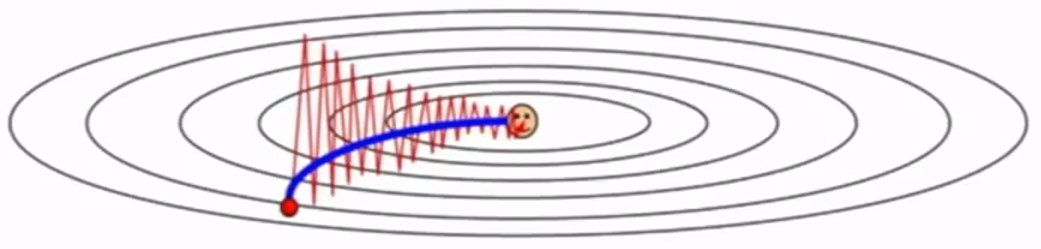
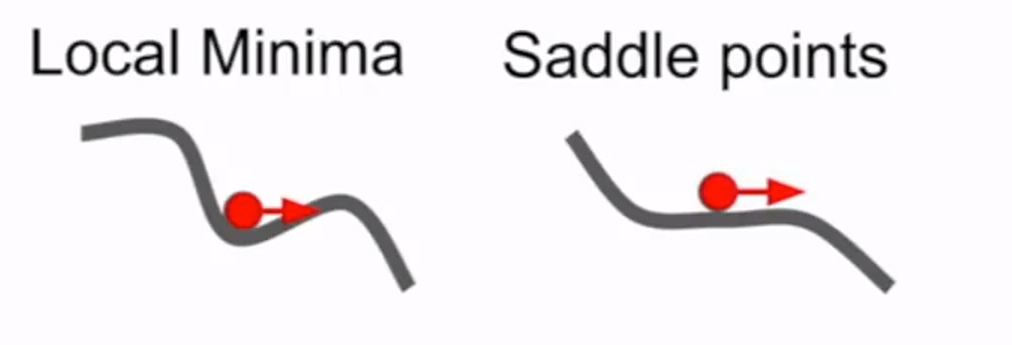
陷入极小点和鞍点是普通梯度下降法可能遇到的不好的情况。而动量下降,可以使在到达极小点和鞍点时,按惯性“冲出”这种不好的情况。(即使没有梯度,仍会有速度)
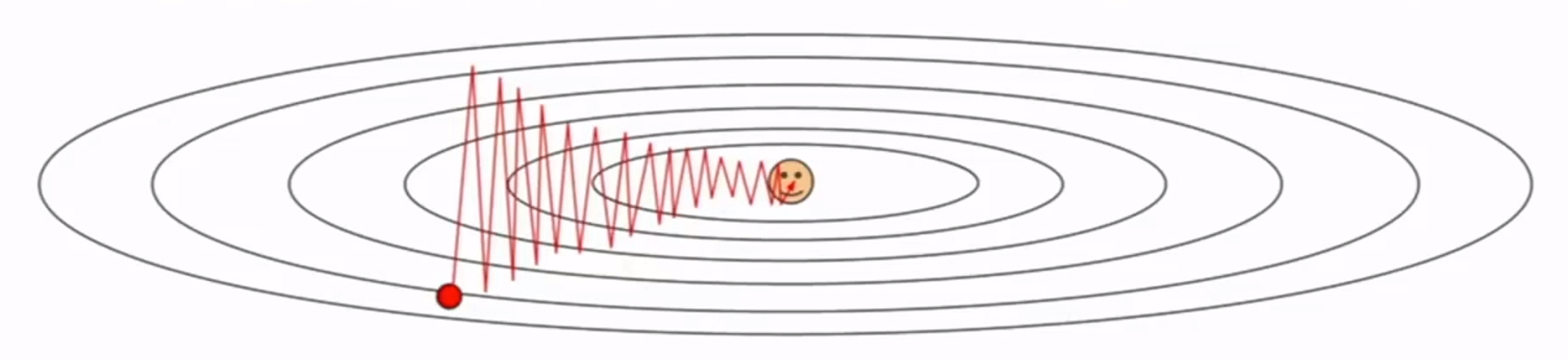
Nesterov Momentum
Nesterov动量的核心思路是,当参数向量位于某个位置$x$时,观察上面的动量更新公式可以发现,动量部分(忽视带梯度的第二个部分)会通过mu*v稍微改变参数向量。因此,如果要计算梯度,那么可以将未来的近似位置x+mu*v看做是“向前看”,这个点在我们一会儿要停止的位置附近。因此,计算x + mu * v的梯度而不是“旧”位置x的梯度就有意义了。
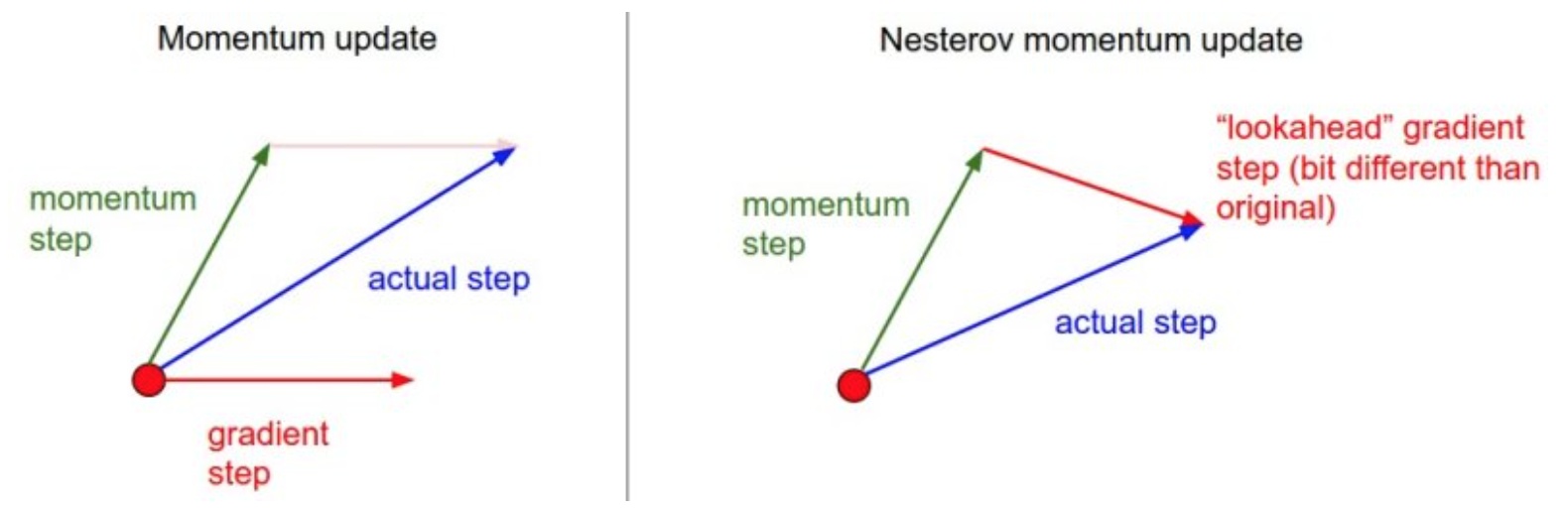
如图,既然我们知道动量将会把我们带到绿色箭头指向的点,我们就不要在原点(红色点)那里计算梯度了。使用Nesterov动量,我们就在这个"looked-ahead"的地方计算梯度。
1 | x_ahead = x + mu * v |
令$\tilde{x}_t=x_t+\beta{v}_t$,就有另一个简单点的表示
1 | v_prev = v # 存储备份 |
来自cs231n:
在理论上Nesterov Momentum对于凸函数它能得到更好的收敛,在实践中也确实比标准动量表现更好一些。对于NAG(Nesterov’s Accelerated Momentum)的来源和数学公式推导,我们推荐以下的拓展阅读:
Yoshua Bengio的Advances in optimizing Recurrent Networks,Section 3.5。
Ilya Sutskever’s thesis (pdf)在section 7.2对于这个主题有更详尽的阐述。
Adagrad
Adagrad是一个由Duchi等提出的适应性学习率算法1
2
3# 假设有梯度和参数向量x
cache += dx**2
x += - learning_rate * dx / (np.sqrt(cache) + eps)
注意,变量cache跟踪了每个参数的梯度的平方和,用来归一化参数更新步长。cache使接收到高梯度值的权重更新的效果被减弱,而接收到低梯度值的权重的更新效果将会增强。
例如,这种情况下,纵向梯度值较高被,横向梯度较低,纵向梯度被削弱就会少走一些弯路。
eps(一般设为1e-4到1e-8之间)防止出现除以0的情况。
缺点:随着梯度的累计,步长会越来越小,容易陷入极小点,在深度学习中单调的学习率被证明通常过于激进且过早停止学习。
RMSprop
RMSprop是Adagrad的一种变体。
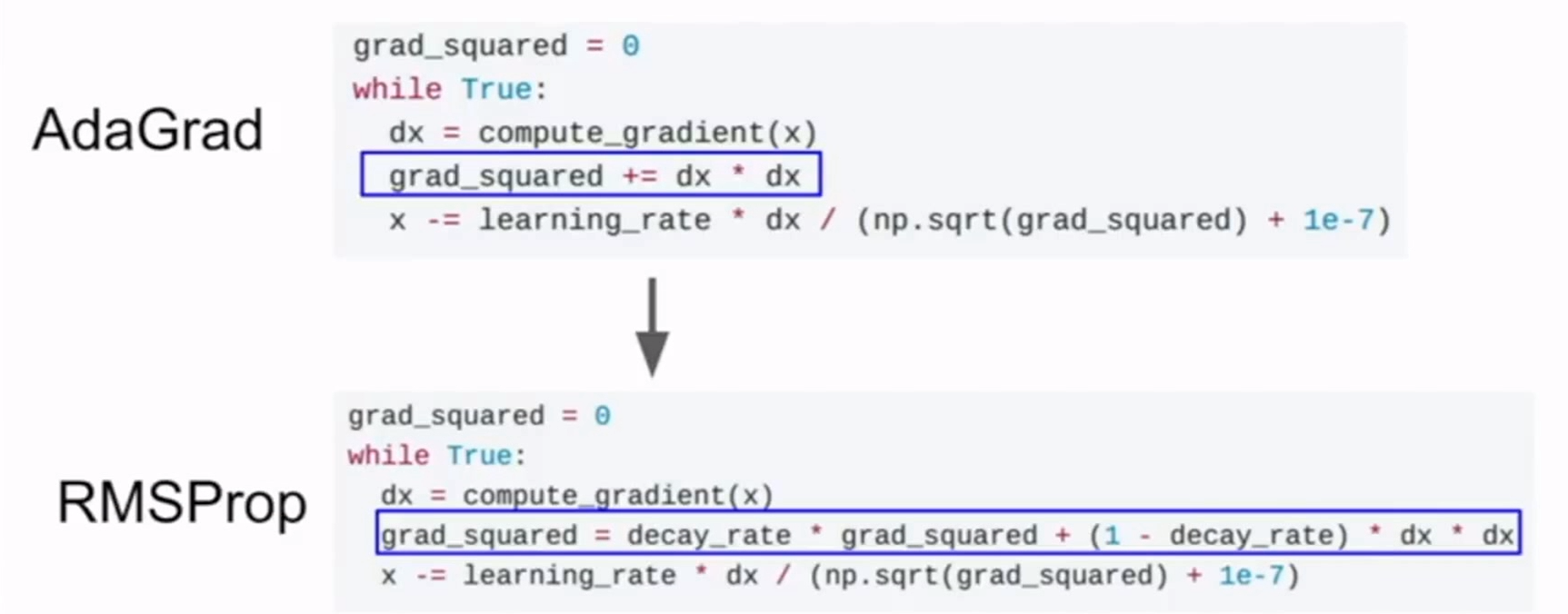
RMSprop将grad_squard作为梯度平方的指数加权平均。
1 | cache = decay_rate * cache + (1 - decay_rate) * dx**2 |
在上面的代码中,decay_rate是一个超参数,常用的值是[0.9,0.99,0.999]。
RMSProp仍然是基于梯度的大小来对每个权重的学习率进行修改,同样效果不错。但是和Adagrad不同,其更新不会让学习率单调变小。
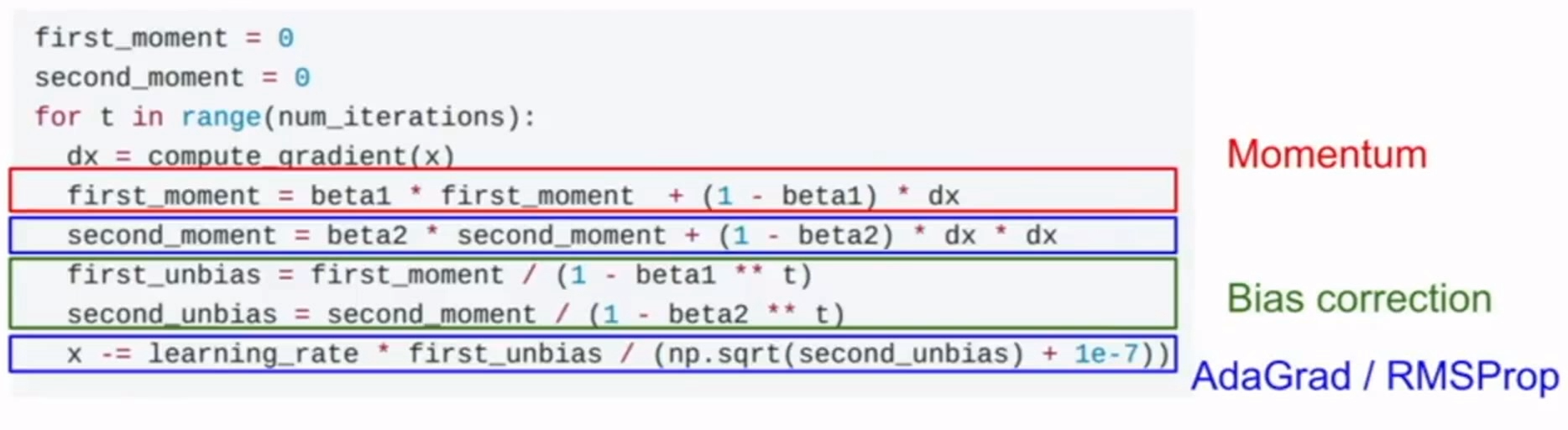
Adam
Adam是最近才提出的一种更新方法,它看起来像是RMSProp的动量版。
简易版Adam:

注意这个更新方法看起来是RMSProp+Momentum。
论文中推荐的参数值eps=1e-8,beta1=0.9,beta2=0.999
(learning_rate=1e-3或5e-4)。
(在实际操作中,推荐Adam作为默认的算法,一般而言跑起来比RMSProp要好一点。但是也可以试试SGD+Nesterov动量。)
完整的Adam算法包含一个偏置修正机制,因为m,v两个矩阵初始为0,指数加权平均中,初期前存在较大偏差:就算梯度很小,也很可能会产生很大的步长。
完整版Adam: