cs231n assignment3(LSTM_Captioning)
上个实验中的virtual RNN,存在一个问题,就是无法解决长期依赖问题(long-term dependencies)。当时间序列变得很长的时候,前后信息的关联度会越来越小,直至消失,即所谓的梯度消失现象。
GRU(Gated Recurrent Unit)单元
GRU用了个更新门的东西(它出现的时间比LSTM要晚),来维持一个长时间的记忆。
看一个例子:
The cat, which already ate …, was full.
这里我们看到,cat和was之间隔了一个很长的定语从句,在这之间RNN可能记不到之前的信息。
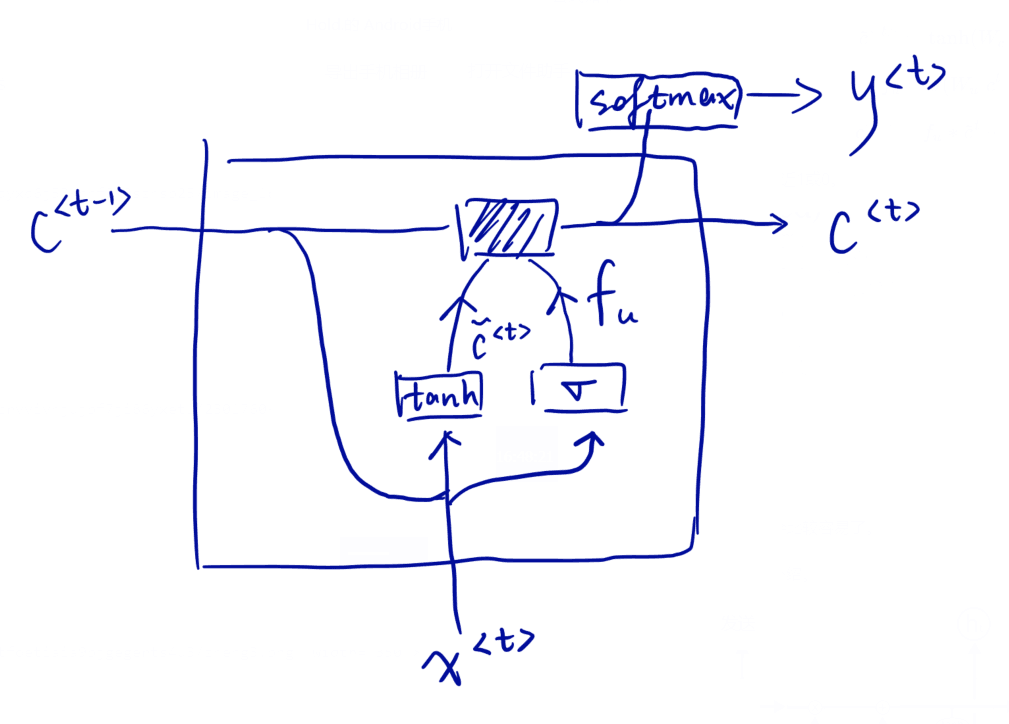
于是这里用一个c = memory cell来表示长期的记忆;一个更新门$f_u$来确定是否对c进行更新,因为可能并不是每次都对c进行改变,可以达到一个长期记忆的效果。
公式如下:
Sigma函数使$f_u$很容易就非常接近1或0。
LSTM原理
有了门的概念之后,理解LSTM会比较容易了。
一个LSTM单元有三个门,后面介绍。

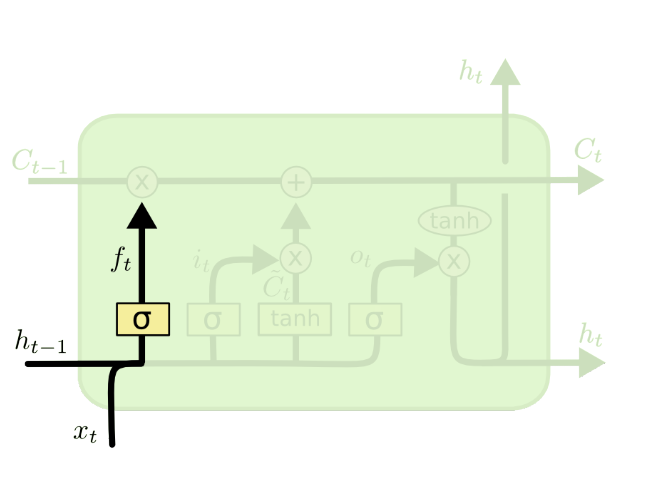
遗忘门
遗忘门决定对上次的$c^{
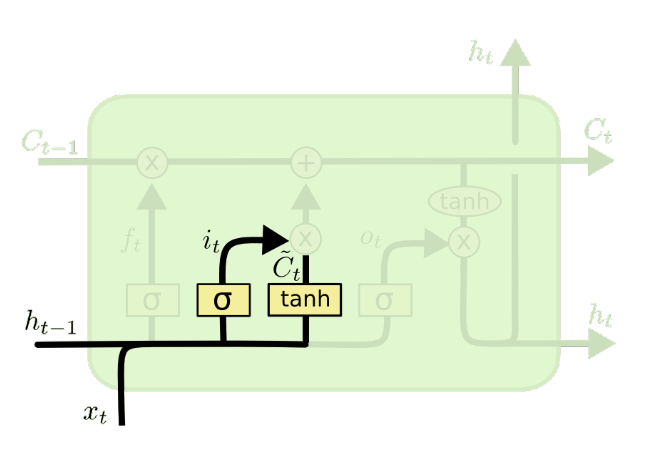
更新门
更新门决定对本次计算新生成的$\tilde{c}^{
同时计算一下memory cell的值
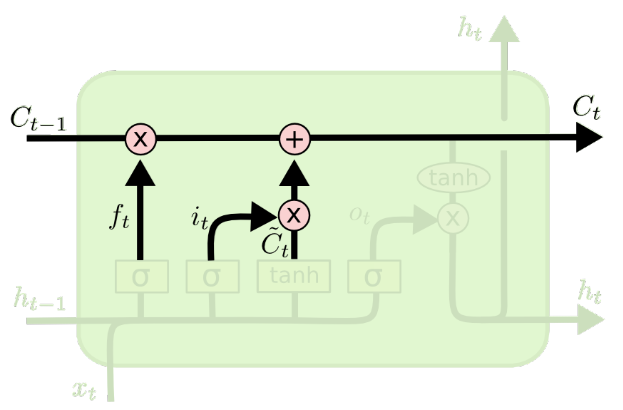
有了更新门和遗忘门还有新的memory cell,就可以对memory cell进行更新
输出门
更新门和遗忘门都是针对$c^{
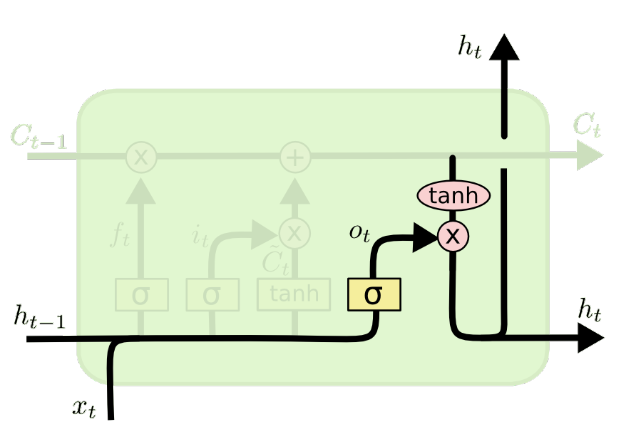
以上就是标准的LSTM,当然它还有很多变体这里就不再介绍。下面是作业内容。
LSTM Step
Forward Pass
1 | def lstm_step_forward(x, prev_h, prev_c, Wx, Wh, b): |
Backward Pass
不用推公式,用计算图递归求导就好了。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41def lstm_step_backward(dnext_h, dnext_c, cache):
"""
Backward pass for a single timestep of an LSTM.
Inputs:
- dnext_h: Gradients of next hidden state, of shape (N, H)
- dnext_c: Gradients of next cell state, of shape (N, H)
- cache: Values from the forward pass
Returns a tuple of:
- dx: Gradient of input data, of shape (N, D)
- dprev_h: Gradient of previous hidden state, of shape (N, H)
- dprev_c: Gradient of previous cell state, of shape (N, H)
- dWx: Gradient of input-to-hidden weights, of shape (D, 4H)
- dWh: Gradient of hidden-to-hidden weights, of shape (H, 4H)
- db: Gradient of biases, of shape (4H,)
"""
A, x, prev_h, prev_c, Wx, Wh, b, next_h, next_c = cache
dsigmoid_a2 = dnext_h * np.tanh(next_c)
dnext_c += dnext_h * sigmoid(A[:, 2, :]) * (1 - np.tanh(next_c) ** 2)
dsigmoid_a1 = dnext_c * prev_c
dsigmoid_a0 = dnext_c * np.tanh(A[:, 3, :])
dtanh_a3 = dnext_c * sigmoid(A[:, 0, :])
dA = np.zeros(A.shape)
dA[:, 0, :] = dsigmoid_a0 * sigmoid(A[:, 0, :]) * (1 - sigmoid(A[:, 0, :]))
dA[:, 1, :] = dsigmoid_a1 * sigmoid(A[:, 1, :]) * (1 - sigmoid(A[:, 1, :]))
dA[:, 2, :] = dsigmoid_a2 * sigmoid(A[:, 2, :]) * (1 - sigmoid(A[:, 2, :]))
dA[:, 3, :] = dtanh_a3 * (1 - np.tanh(A[:, 3, :]) ** 2)
dprev_c = dnext_c * sigmoid(A[:, 1, :])
N, D = x.shape
dA = dA.reshape(N, -1)
dx = dA.dot(Wx.T)
dWx = x.T.dot(dA)
dprev_h = dA.dot(Wh.T)
dWh = prev_h.T.dot(dA)
db = np.ones((N,)).dot(dA)
return dx, dprev_h, dprev_c, dWx, dWh, db
LSTM
这一部分与RNN差不多。
Forward Pass
1 | def lstm_forward(x, h0, Wx, Wh, b): |
Backward Pass
1 | def lstm_backward(dh, cache): |
loss,grads,sample稍微修改一点就好。