仿射变换&双线性插值
线性变换
在学习仿射变换之前,先看一下线性变换。
我们定义:
- 点$k$二维空间内一点,用列向量$\left[
\begin{matrix}
x \\y
\end{matrix}
\right]
$表示 - 矩阵$M=\left[
\begin{matrix}
a & b \\c & d
\end{matrix}
\right]$表示一个$(2\times2)$的一个方阵
通过对$M$取不同的值,可以对$k$完成不同的线性变换。
例如,当$M=\left[
\begin{matrix}
1 & 0 \\0 & 1
\end{matrix}
\right]$时,
下面来看典型的基本线性变换是如何实现的。
放缩(Scaling)
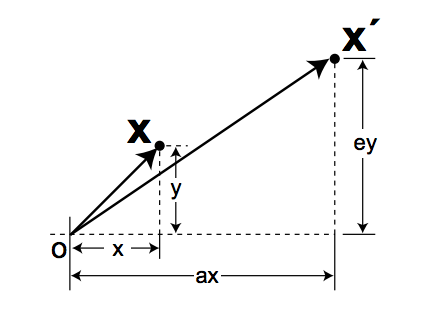
我们取$b=c=0$,$a$和$d$取任意整数:
可以得到
旋转(Rotation)
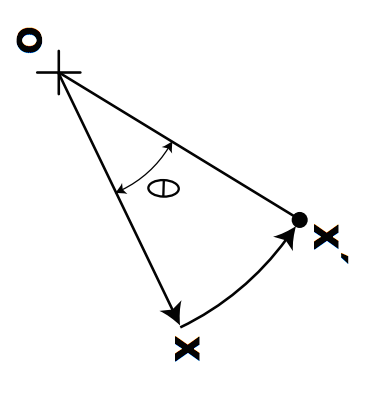
如图,假设我们想旋转$\theta$,那我们需要设置$a=d=\cos\theta,b=-\sin\theta,c=\sin\theta$
旋转后的坐标
裁剪(Shear)
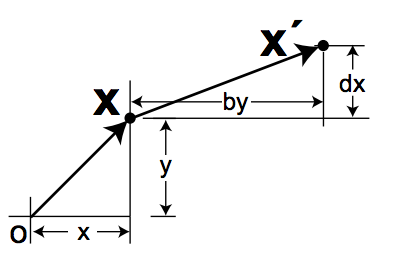
(好吧,这个变换我根本不懂什么意义)
小结
我们定义了3个基本的线性变换:
- 放缩:按标量缩放x和y方向。
- 旋转:将点绕原点旋转角度θ。
- 裁剪:将x偏移与y成正比的数字,并将x偏移与x成正比的数字。
由于矩阵乘法的交换律,我们可以把多个线性变换合成一个线性变换。
比如,我们要对$k$依次进行进行一次放缩变换$S$,一次裁剪变换$H$,一次旋转变换$R$。
由矩阵乘法的结合律得
所以矩阵乘法有个好处:当我们进行多次线性变换的时候,不需要对进行多次矩阵乘法运算,只需要找到对的$M$,就可以一步到位!
仿射变换
简单来说,仿射变换就是:线性变换+平移
上面的变换可以将图像扭成任意形状,但在二维坐标系内,用2x2的矩阵所不能表示的变换就是平移操作。而平移是图像转换的重要变换.
所以,我们用一个三维的齐次坐标来表示二维向量:
- 点$k$用一个$(3\times1)$列向量$\left[\begin{matrix}x \\y \\1
\end{matrix}\right]$表示 - 矩阵$M=\left[
\begin{matrix}
a & b & 0\\c & d & 0 \\0 & 0 & 1
\end{matrix}
\right]$表示一个$(3\times3)$的一个方阵
为了表示平移变换,我们只需要在$M$的第三列放两个新的参数$e,f$
如果只需为二维输出,那么只要用一个$2\times3$的矩阵来表示$M$,就可以进行我们的仿射变换。
双线性插值
当我们进行了仿射变换后,比如旋转或者放缩,得到左图各像素点在右图中对应的位置,但转换后的坐标往往不是整数。我们需要得到右图每个整数点的像素值才能渲染出这张image。所以要想点办法。
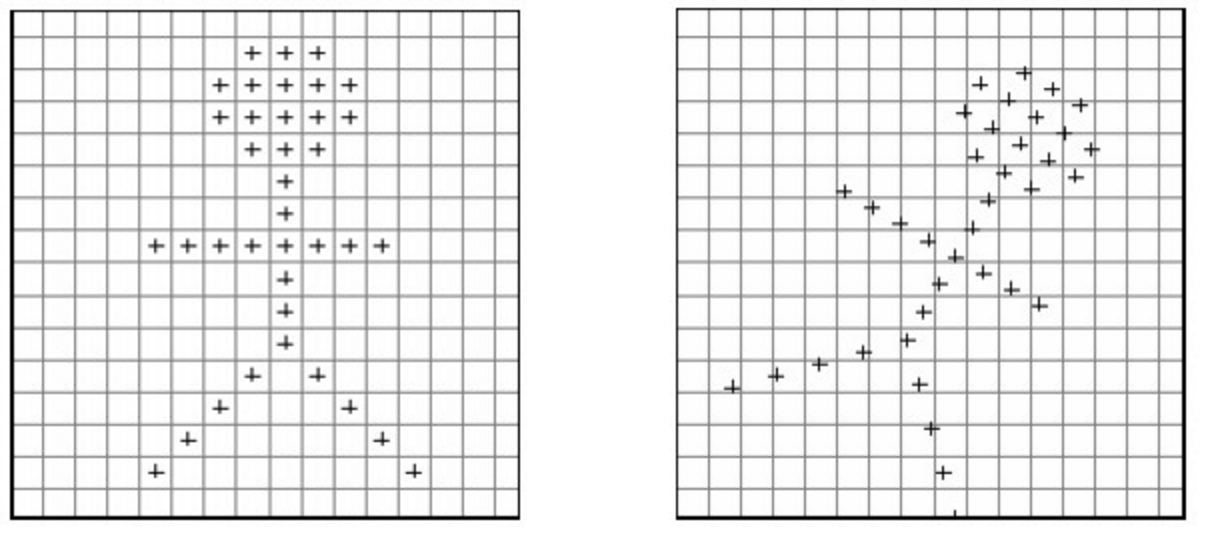
考虑到,我们将左图乘了一个$M$得到变换后的坐标,同样存在一种逆变换$M’$可以让我们将右图各像素点还原到左图相对应的位置。同样,这些位置虽然不一定是整数,但我们可以使用双线性插值等方法对其像素值进行估计。
所以在实际操作中所求的$M$其实是一种从后到前的逆变换。
(个人理解)
算法原理
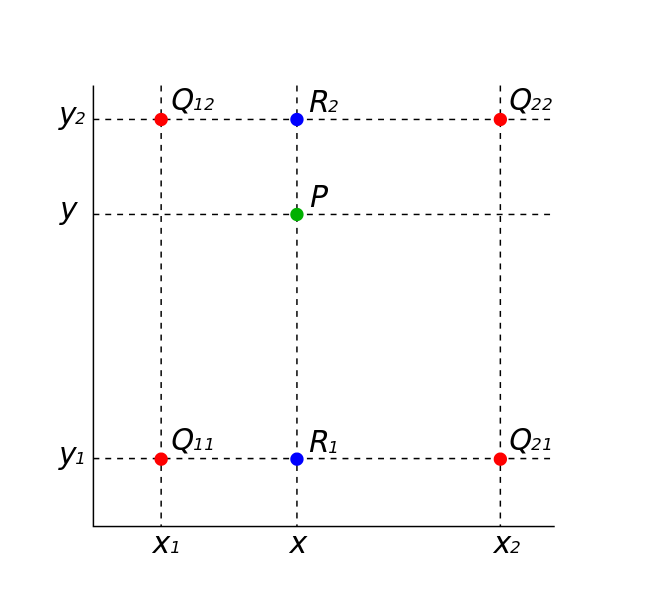
先做$x$轴方向的线性插值得到$R_2$和$R_1$。
再做$y$轴方向的线性插值
当然也可以先做$y$轴的插值在做$x$轴的插值。
代码
搬运:kevin’s blog